Arduino学习
[TOC]
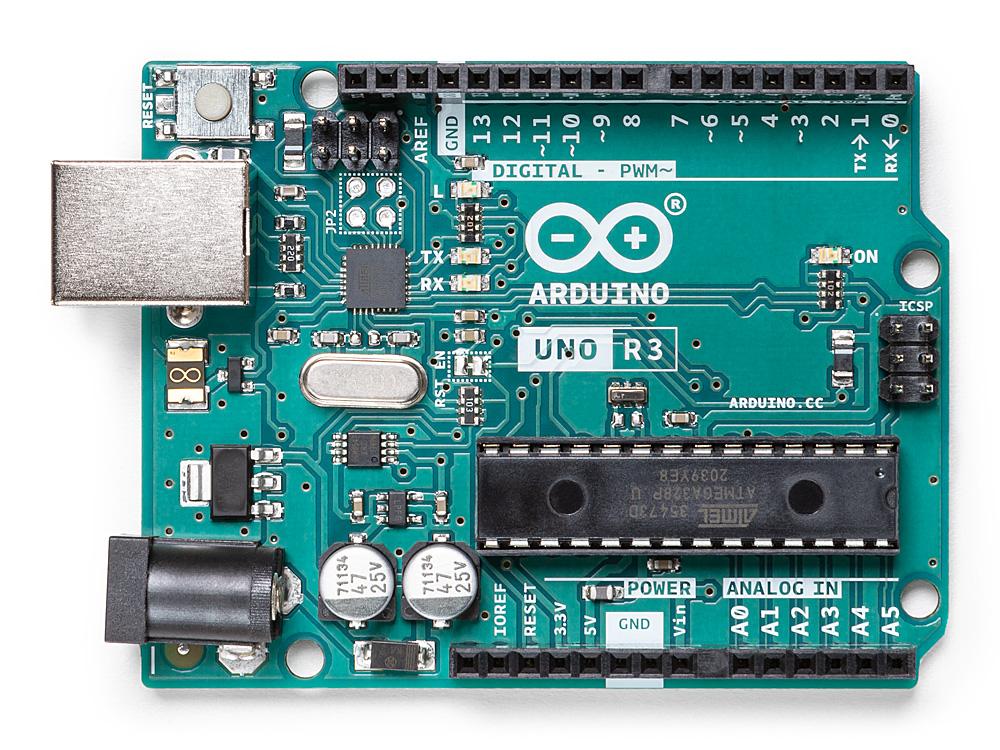
Arduino UNO
解析图
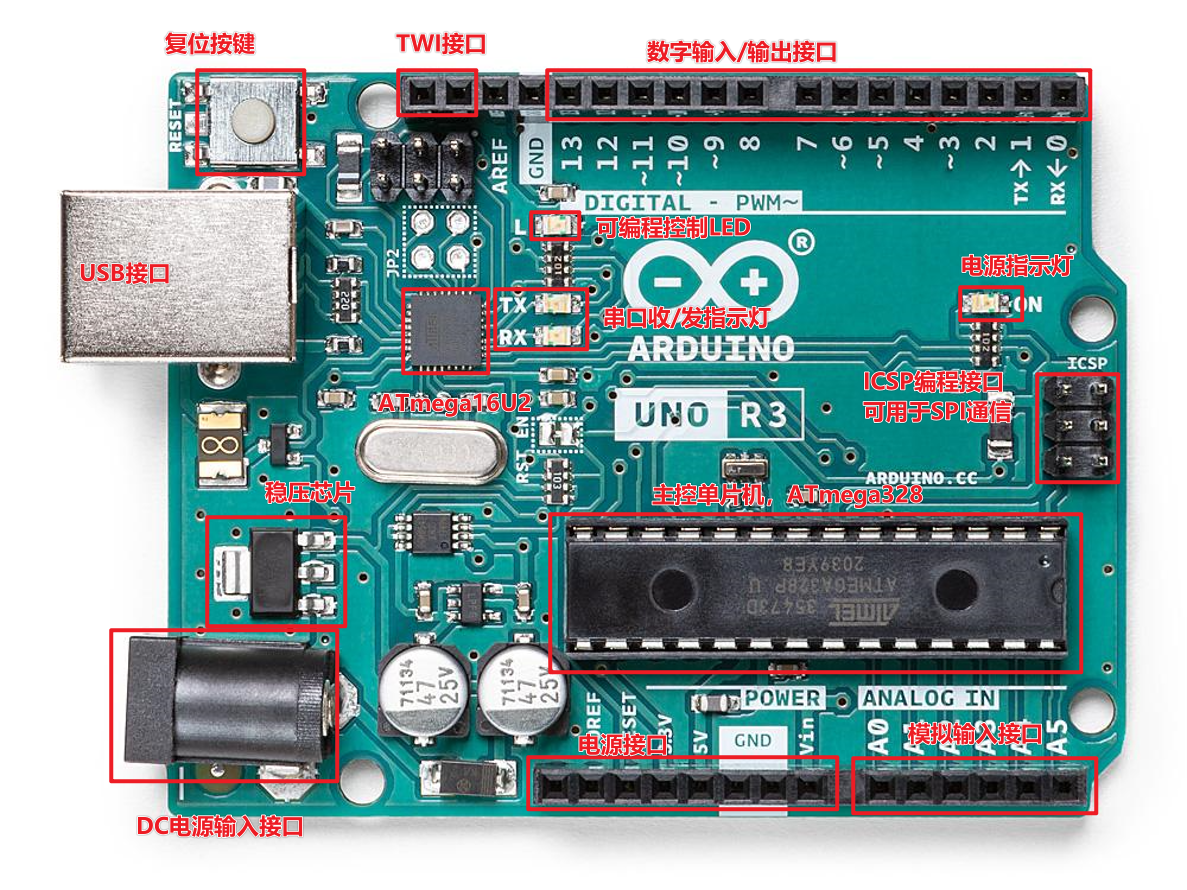
- 电源
- 通过USB供电,电压为5V;
- 通过DC电源输入接口供电,电压要求7~12V;
- 通过电源接口处5V或者VIN供电,5V端口处供电必须为5V,VIN端口处供电为7~12V;
- 指示灯
- ON,电源指示灯
- TX,串口发送指示灯
- RX,串口接受指示灯
- L,可编程指示灯,通过特殊电路连接到13号引脚,当13号引脚为高电平或高阻态时点亮,低电平时不会点亮
- 存储空间
- FLASH 32KB 其中0.5KB作为BOOT区存放引导程序,实现串口下载的功能。另外的31.5KB存放程序
- SRAM 2KB 内存
- EEPROM 1KB 电可擦写的可编程只读存储器
- 输入/输出端口
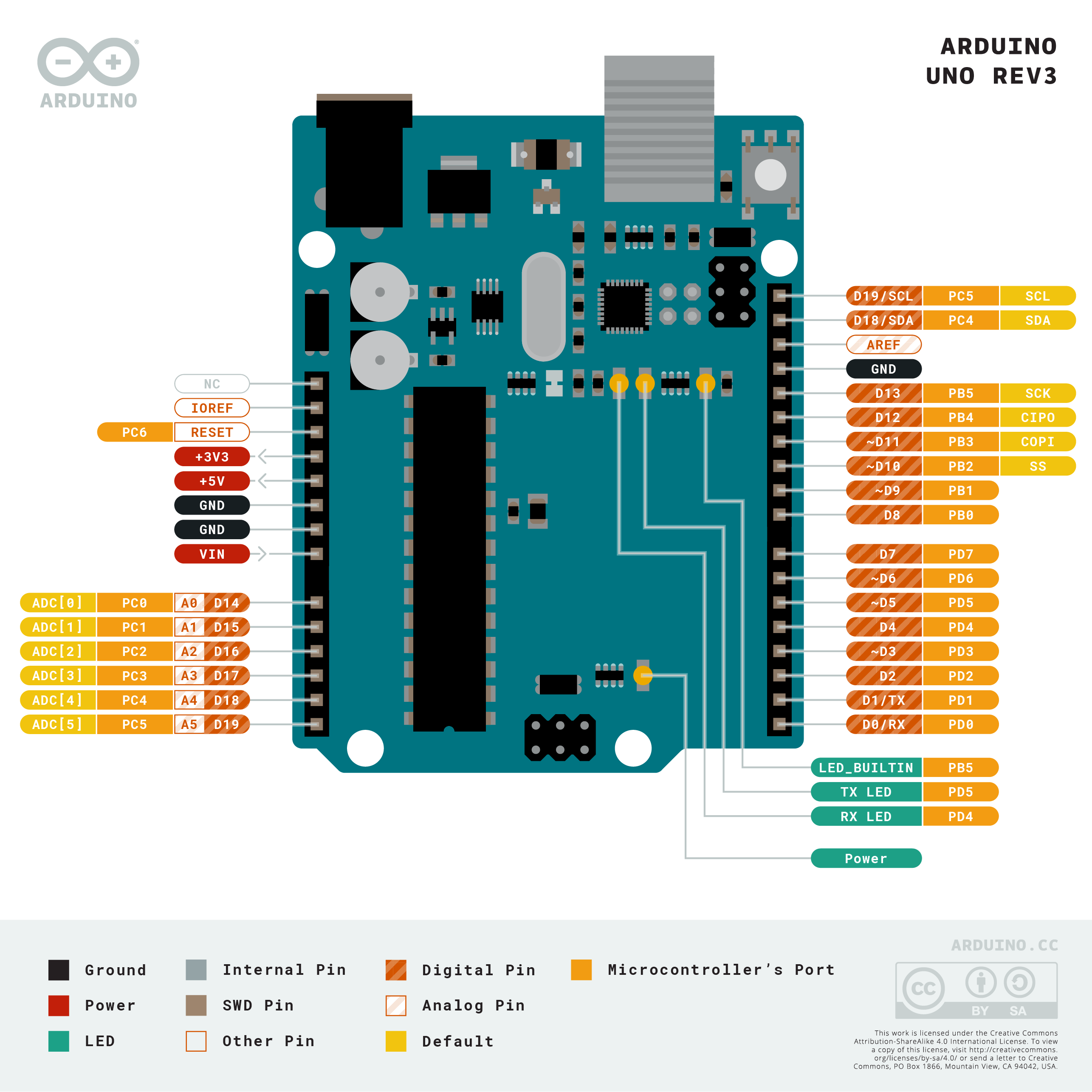
- UART通信,为0(RX)和1(TX)引脚,用于接收和发送串口数据,这两个引脚通过连接到ATmega16U2与计算机通信
- 外部中断,为2和3引脚,可以输入外部中断信号
- PWM输出,为3、5、6、9、10和11引脚,可以输出PWM波
- SPI通信,为10(SS)、11(MOSI),12(MISO)和13(SCK)引脚,可用于SPI通信
- TWI通信,为A4(SDA),A5(SCL)引脚和TWI接口,可用于TWI通信,兼容IIC通信
- AREF,模拟输入参考电压的输入端口
- RESET,复位端口,接低电平会使Arduino复位
Arduino语言及程序结构
程序结构
1 | void setup() |
Arduino控制器通电或复位后,执行setup()函数中的程序代码,只会执行一次。setup()函数中的代码执行完以后,会重复执行loop()函数中的程序。
引脚操作
pinMode(pin,value)
pinMode有三种模式
INPUT(0) 输 入 模 式
OUTPUT(1) 输 出 模 式
INPUT_PULLUP(2) 输入上拉模式
digitalWrite(pin,value)
value的值
HIGH(1):高电平
LOW(0):低电平
digitalRead(pin)
将-0.5~1.5V的输入电压作为低电平
将3~5.5v的输入电压作为高电平
模拟量
analogRead(A0)
Arduino有十位精度,5v电压可分为0~1023
analogWrite(9)
Arduino的模拟量输出不需要再setup()中声明,采用的是PWM方式模拟的电压输出,范围为0~255。
analogWrite和analogRead已经完成了引脚的初始化,不用在setup()函数中初始化了。
串口通信
1 | Serial.begin(9600) |
规定串口通信波特率,可用300、600、1200、2400、4800、9600、14400、19200、28800、38400、57600、115200,单位是(bit)。
1 | Serial.print(val); |
1 | Serial.read() |
调用该语句,每次返回1字节的数据,在使用Serial时,Arduino会在SRAM开辟一段64B的空间,串口接收到的数据都放在该空间中。当缓存区中没有数据时,会返回int型值-1。
1 | millis() |
该函数返回Arduino从通电(或复位)到现在的时间,单位为毫秒,类型为unsigned long大概50天会溢出一次。
1 | micros() |
该函数返回系统运行时间,单位是微秒,约70分钟溢出一次。
1 | delay(1000) |
此函数为毫秒级延时
1 | delayMicroseconds() |
此函数为微秒级延时
高级应用
tone(pin,frequency[,duration])
可以指定引脚产生占空比50%的指定频率的方波。
使用tone()函数会影响3号和11号引脚的PWM输出,并且只能作用于一个引脚,对其他引脚使用需使用noTone()函数停止之前使用了tone()函数的引脚。
pulseIn(pin,value[,timeout])
功能:检测指定引脚上的脉冲信号宽度
参数:
pin:读取脉冲的引脚
value:读取的脉冲类型,为HIGH或LOW
timeout:超时时间,单位为微秒,未设置超时时间,默认为1s
返回值:脉冲宽度,单位为微秒,数据类型为无符号长整型,如果未检测到脉冲,则返回0。
超声波模块使用方法:
引脚名称 说明 Vcc 电源5V Trig 触发引脚 Echo 回馈引脚 GND 地 给Trig引脚至少10$\mu s$的高电平信号触发测距功能,模块会自动发送8个40kHz的超声波脉冲,并自动检测是否有信号返回,若有信号返回,则Echo引脚会输出高电平,高电平持续时间就是超声波从发射到返回的时间。
设置ADC参考电压
$\mathrm{analogRead}(\mathrm{pin})函数返回值=\frac{被测电压}{参考电压}\times1023$,当没有设置参考电压时,默认使用工作电压(5V)为参考电压。通过$\mathrm{AREF}$引脚输入外部参考电压。使用$\mathrm{analogReference()}$设置参考电压
1 | analogReference(type); |
| type | 说明 |
|---|---|
| DEFAULT | 工作电压作为参考电压 |
| INTERNAL | 使用内部参考电压(UNO为1.1V) |
| EXTERNAL | 使用从AREF引脚输入的外部参考电压 |
❌ 外部参考电压必须大于0,且小于当前工作电压(5V),否则可能会损坏Arduino
外部中断
中断引脚
ArduinoUNO只支持两个中断引脚,分别为2(int0)、3(int1)。
中断模式
| 模式名称 | 说明 |
|---|---|
| LOW | 低电平触发 |
| CHANGE | 电平变化触发,即高变低或低变高 |
| RISING | 上升沿触发 |
| FALLING | 下降沿触发 |
中断函数
中断函数不能带有任何参数,且返回类型为空。
1 | void test() |
还应在$\mathrm{setup()}$中使用$\mathrm{attachInterrupt()}$对中断引脚进行初始化。
attachInterrupt(interrupt,function,mode)
1 | attachInterrupt(0,test,LOW); |
如果不需要中断,可以使用$\mathrm{detachInterrupt()}$来关闭中断。
1 | detachInterrupt(interrupt); |
串口通信
Arduino硬件集成了串口,IIC,SPI三种常见的通信方式。
数据帧格式:

- 起始位总是低电平
- 数据位默认使用8位数据位
- 校验位可以设置奇校验或偶校验或无校验,默认无校验。
- 停止位表示数据帧传输结束,停止位总为高电平,可设置1位或2位,默认为1位。
函数
available()
功能:获取串口接受缓存区的字节数,缓存区最多保存64B
begin()
初始化串口,配置各项参数
speed:波特率
config:数据位、校验位、停止位配置。
end()
结束串口通信,可使该串口所在的数字引脚作为普通数字引脚使用。
find()
从串口缓存区读取数据直到读到指定的字符或字符串。
返回true(找到),false(没有找到)。
findUntil()
从串口缓存区读取数据,直到读到指定的字符串或指定的停止符。
target:需要搜索的字符串或字符。
terminal:停止符。
无返回值。
flush()
等待正在发送的数据发送完成。
parseFloat()
从串口缓存区返回第一个有效的float数据。
parseInt()
从串口流中查找第一个有效的整型数据。
peek()
返回1字节的数据,但不会从接收缓存区删除该数据,如无可读数据,返回-1。
print()
将数据输出到串口,以ASCII码形式输出。
format:
- 输出的进制形式
- BIN(二进制)
- DEC(十进制)
- OCT(八进制)
- HEX(十六进制)
- 指定float型数据带小数的位数。
println()
功能与print()相同,只是会加回车换行。
read()
从串口读取1个字节数据,并将其从接受缓存区移除。
readBytes()
从缓存区读取指定长度的字符,并将其存入一个数组中。
buffer:数组
length:读取的字符长度,如果没有找到有效的数据,则返回0;
readBytesUntil()
character:停止符。
setTimeout()
设置超时时间,用于设置readBytes()和readBytesUntil()等待串口数据时间。
time单位为毫秒
write()
输出数据到串口
2
3
Serial.write(str);
Serial.write(buf,len)
print()和write()的区别:
print是将数据转换为ASCII码再发送出去,如输出整型变量123,会输出123。
write发送的是数值本身,串口监视器接收到数据后,会将数值当作ASCII码形式显示,所以write输出整型变量123,会显示
{。
串口事件
1 | void serialEvent() |
当串口接收缓存区中有数据时,会触发该事件。会在两次loop()循环之间检测串口缓冲区是否有数据,如果有就执行serialEvent函数。
串口缓冲区
串口缓冲区默认为64字节,通过宏定义可以增大读写缓冲区的空间。
1 |
软件模拟串口通信——SoftwareSerial
软串口是由程序模拟生成的,使用不如硬串口稳定,使用之前需先声明包含SoftwareSerial.h头文件,其成员函数与硬串口类似,有available()、begin()、write()、print()、println()、peek()等。
SoftwareSerial()
初始化软串口
listen()
开启软串口监听状态。Arduino同一时间内只能监听一个软串口
isListening()
检测软串口是否处于监听状态
overflow()
检测缓冲区是否已经溢出,软串口缓冲区最多可保存64B数据
当切换不同的软串口时,需要对要监听的软串口使用port.listen()启动监听。
IIC总线使用
使用IIC协议可以通过两根双向的总线(数据线SDA和时钟线SCL)使Arduino连接最多128个IIC从机。IIC又称TWI(Two-Wire serial Interface)
IIC是一种半双工通信方式。
Arduino使用第三方类库Wire来进行IIC通信
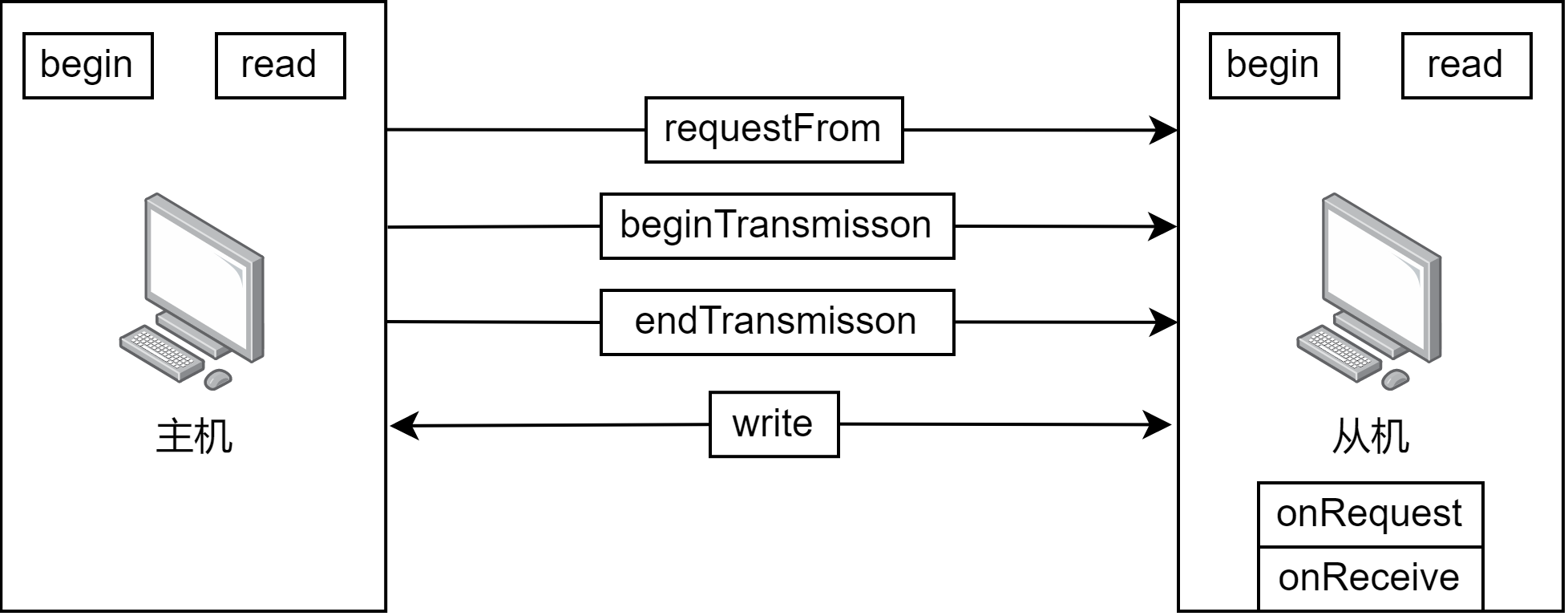
begin([address])
未指定address,则以主机模式加入IIC总线,address可设置成0~127中的任意地址。
requestFrom(address,quantity[,stop])
quantity:请求的字节数
stop:当为true时,发送停止信息,释放IIC总线,当为false,继续保持IIC总线有效连接。
beginTransmission(address)
开始向从机发送数据
endTransmission(stop)
当为true时,释放IIC总线,为false继续保持有效连接。
返回值:byte
- 0,成功
- 1,数据过长,超过发送缓存区
- 2,在地址发送时接收到NACK信号
- 3,在数据发送时接收到NACK信号
- 4,其他错误
write()
将要发送的数据加入发送队列
available()
返回接收到的字节数
read()
读取1B的字节
onReceive(handler)
当从机接收到主机发送的数据时触发
OnRequest(handler)
当从机接收到主机的数据请求时触发
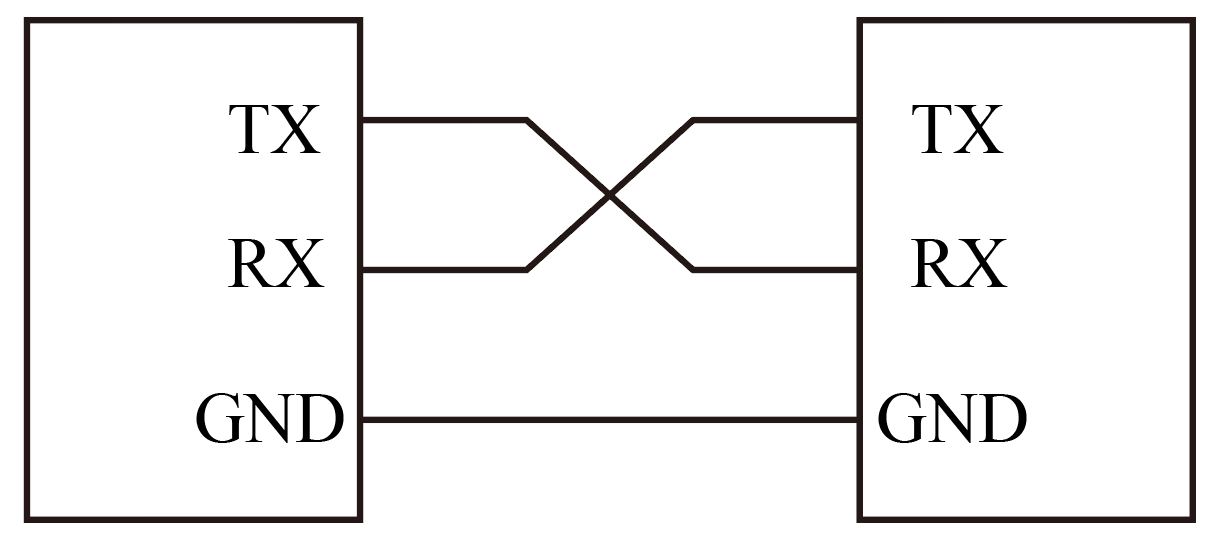
连线
可以通过SCL、SDA接口或A4、A5接口一一连接来建立IIC连接